

搜索
取消
清空记录
历史记录
清空记录
历史记录
电罗经的工作原理
在完成初始对准后,陀螺信号器输出作为两条稳定回路的输入,使伺服环跟踪陀螺坐标系保持方位环指北、水平环水平。加速度计(摆)和水平力矩器(X轴)一起构成修平回路,同时在方位轴(Z轴)力矩器中施加如下式所示的电流补偿地球自转和载体运动,使主轴跟踪子午面,这样就实现了罗经连续指北(导航)的功能。
2023-11-21 11:13:313499拉斯维加斯5318
3.1 电罗经的初始对准
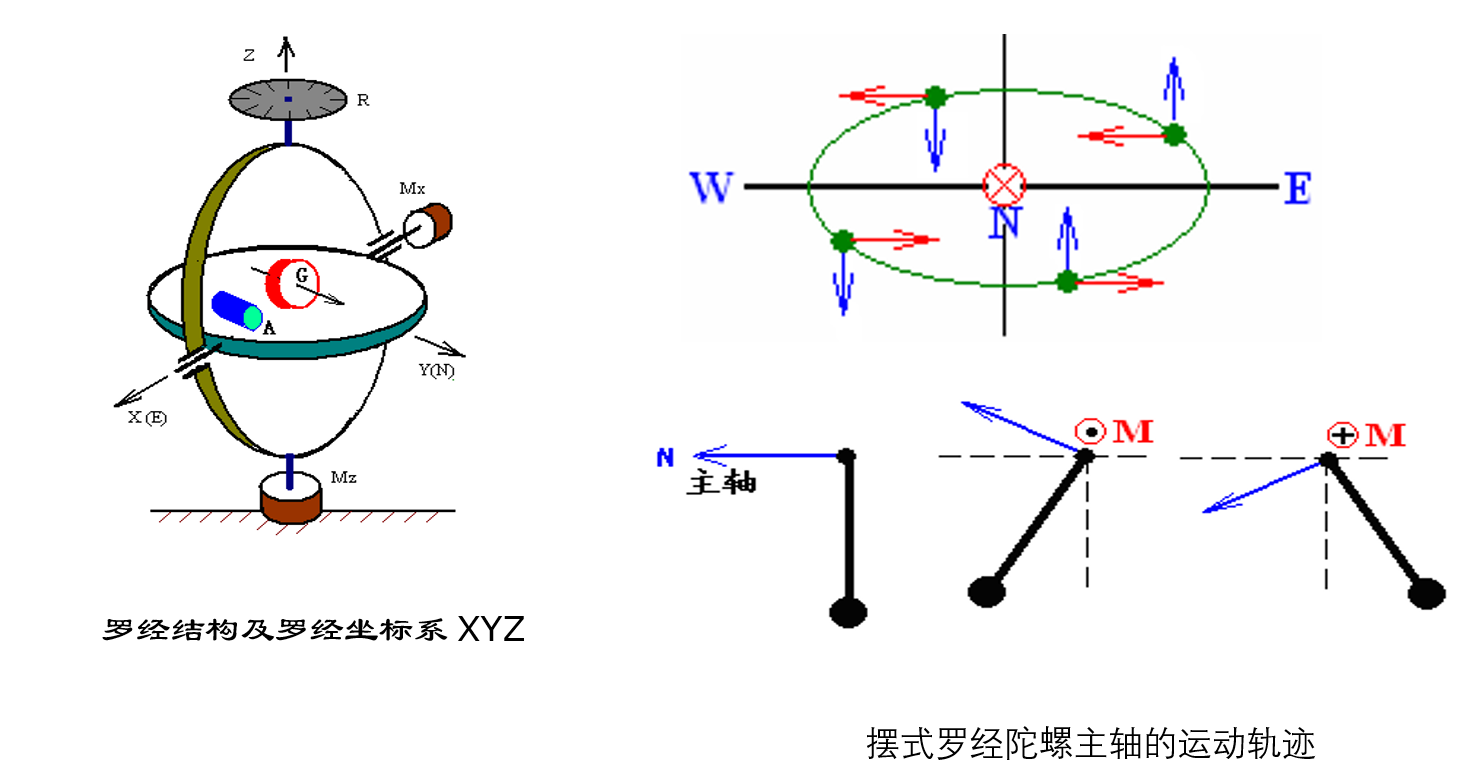
摆式罗经中,在陀螺内框的下方加一重物,使陀螺相对X轴具有摆性,从而使陀螺能够找北,变成罗经。
由于摆性,陀螺主轴在偏离水平面时产生进动,进动方向为:
主轴偏上,向西进动 ;
主轴偏下,向东进动。尤其是在海上动基座环境下,只有利用加表重力垂线的变化和陀螺的进动特性相结合,才能使罗经逐渐收敛到北向。
电控罗经中的摆性是由加速度计或电磁摆输出的信号,经处理后施加到X轴的力矩器中产生摆性,其作用与前述机械摆性的作用一样,产生主轴的“上西下东”进动。
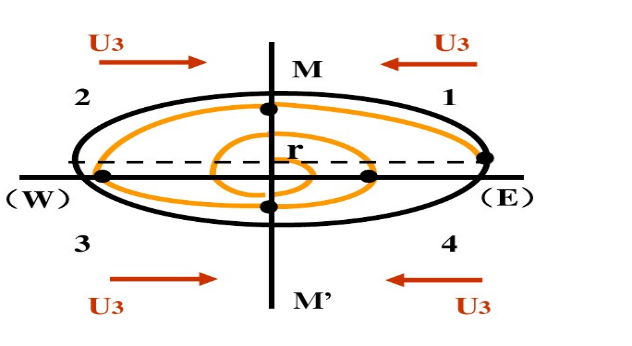
陀螺主轴寻北进度的过程
利用机械陀螺的进动性,按照一定的规律对陀螺力矩器施加电流,陀螺的主轴就会按照上图所示的过程经过一定的时间逐渐收敛的相对真北所给定的误差范围内。
3.2 电罗经的导航功能
在完成初始对准后,陀螺信号器输出作为两条稳定回路的输入,使伺服环跟踪陀螺坐标系保持方位环指北、水平环水平。加速度计(摆)和水平力矩器(X轴)一起构成修平回路,同时在方位轴(Z轴)力矩器中施加如下式所示的电流补偿地球自转和载体运动,使主轴跟踪子午面,这样就实现了罗经连续指北(导航)的功能。
施加到陀螺力矩器中的电流为:
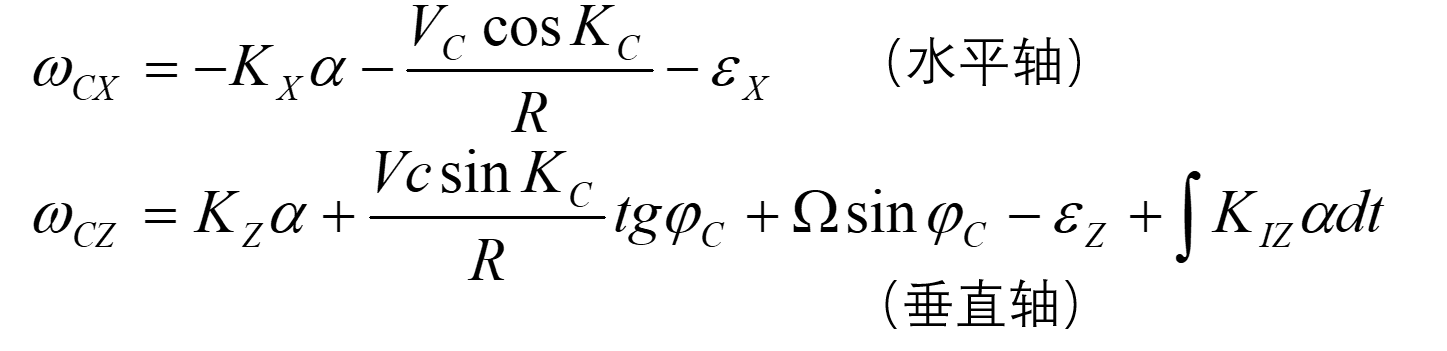
上式中,Kx、Kz为陀螺的刻度因素,Vc为载体的速度,Kc为载体的航向,α为水平环的抬高角度。Φc为载体所在地理纬度。εx、εz为陀螺常值漂移,Kiz为积分常数。

 浏览器自带分享功能也很好用哦~
浏览器自带分享功能也很好用哦~RELATED PROGRAMS
相关方案
 沪公网安备 31011502007089号
沪公网安备 31011502007089号版权所有 © 3499拉斯维加斯
黑ICP备18004167号-1
选择区号