

搜索
取消
清空记录
历史记录
清空记录
历史记录
光纤罗经的工作原理
光纤陀螺本质上作为一个角速率传感器,主要由光源、Y波导、探测器、耦合器、保偏光纤等几部分组成。其工作原理遵从于萨格纳克效应公式,定量关系如上式所示,式中Φ表示激光干涉的相位,L为光纤的长度,R为光纤环的半径,λ为激光的波长,C为光速,Ω为光纤环的转速。
2023-11-21 13:11:103499拉斯维加斯5561
4.1 光纤陀螺工作原理
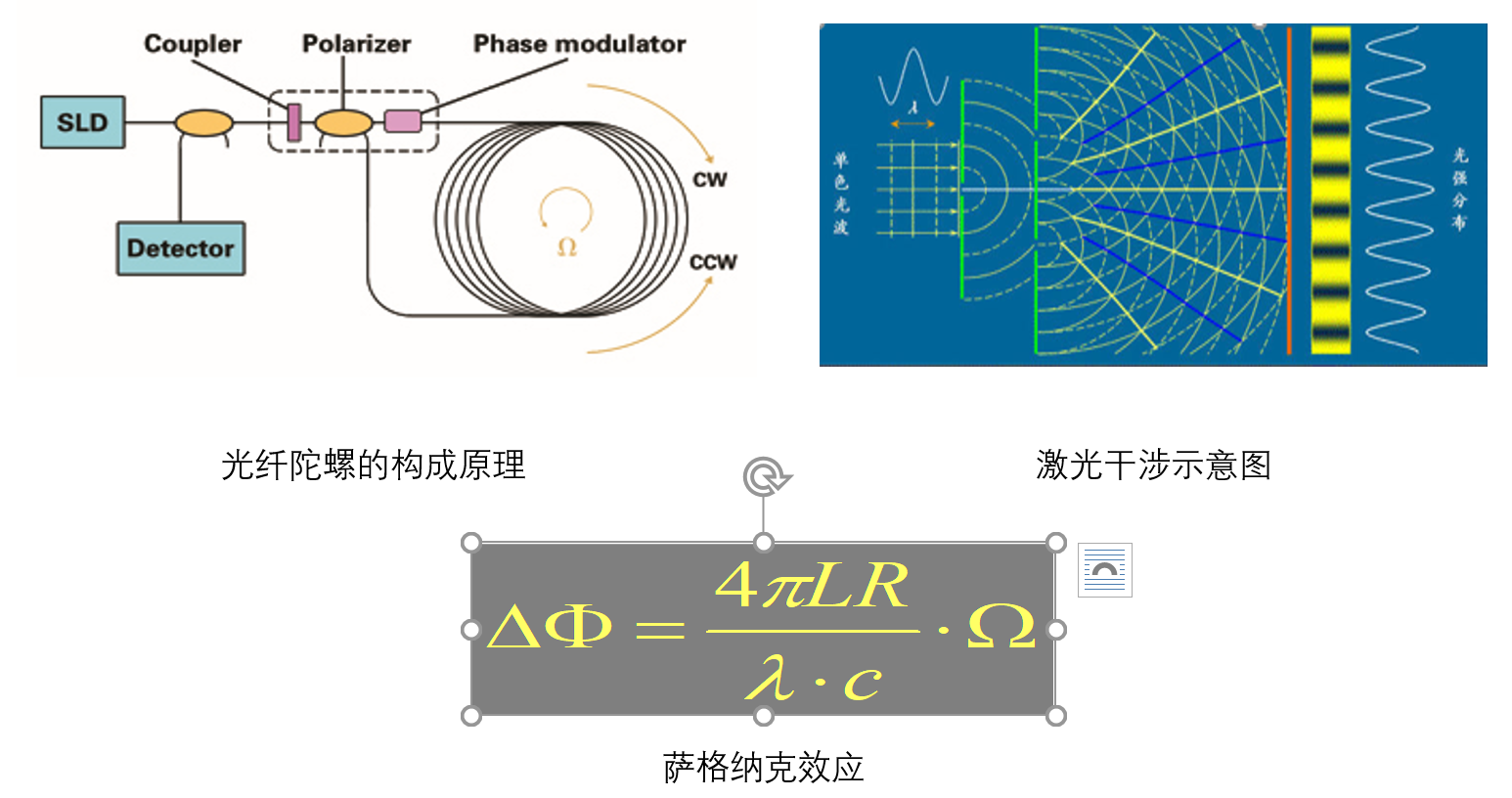
光纤陀螺本质上作为一个角速率传感器,主要由光源、Y波导、探测器、耦合器、保偏光纤等几部分组成。其工作原理遵从于萨格纳克效应公式,定量关系如上式所示,式中Φ表示激光干涉的相位,L为光纤的长度,R为光纤环的半径,λ为激光的波长,C为光速,Ω为光纤环的转速。萨格纳克效应表明,光纤环转动的角速度与激光在光纤环内发生干涉的相位差成正比。这开辟了利用没有运动部件构成的利用光学原理测量运动角速率的新纪元。
4.2光纤陀螺罗经系统的硬件构成
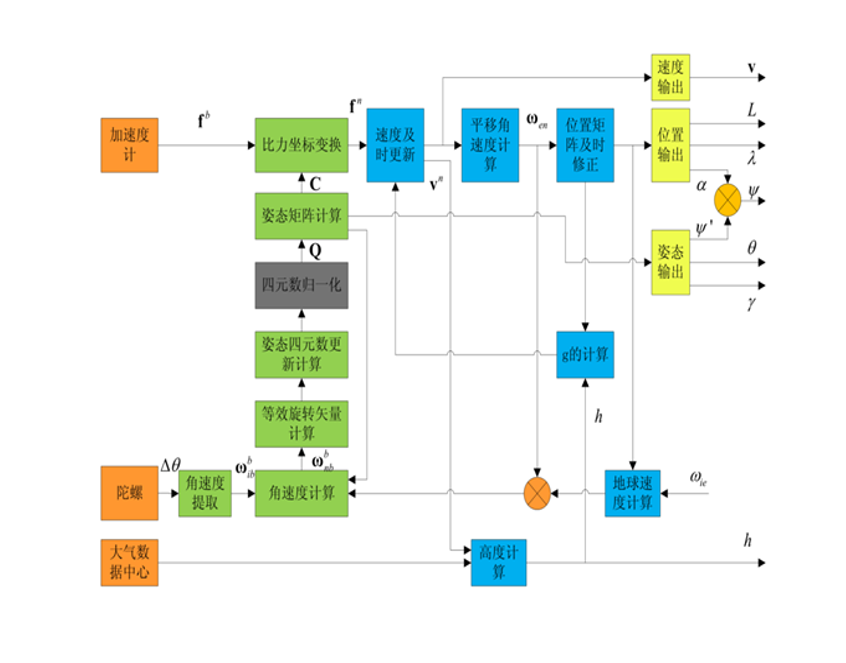
每台光纤罗经由三个相互垂直安装的光纤陀螺和三个加速度计和相应的电路板和计算机构成。
计算机通过对加速度计输出的比力和陀螺输出的角速率信息进行采集与补偿后,根据惯性坐标系下的光纤陀螺罗经数学模型完成载体航向、纵摇、横摇等信息的解算,其算法编排如下图所示。角速度输入的圆锥补偿模块利用光纤陀螺采集角速度信号计算旋转矢量,完成四元数的更新,从而完成矩阵的更新。通过加速度计输出比力的坐标转换与滤波获得姿态矩阵以及相应的航向和姿态角信息。
光纤罗经可以在海面动态环境下,计算出载体的航向、姿态、速度甚至位置等信息,而且没有运动部件,与传统机械陀螺构成的电罗经相比,不仅寿命长,不需要定期更换陀螺,而且精度更高,输出的参数也更多。

 浏览器自带分享功能也很好用哦~
浏览器自带分享功能也很好用哦~RELATED PROGRAMS
相关方案
 沪公网安备 31011502007089号
沪公网安备 31011502007089号版权所有 © 3499拉斯维加斯
黑ICP备18004167号-1
选择区号