

取消
清空记录
历史记录
清空记录
历史记录
地球的运动与陀螺加速度计的功能
1. “地球的运动与陀螺加速度计的功能“
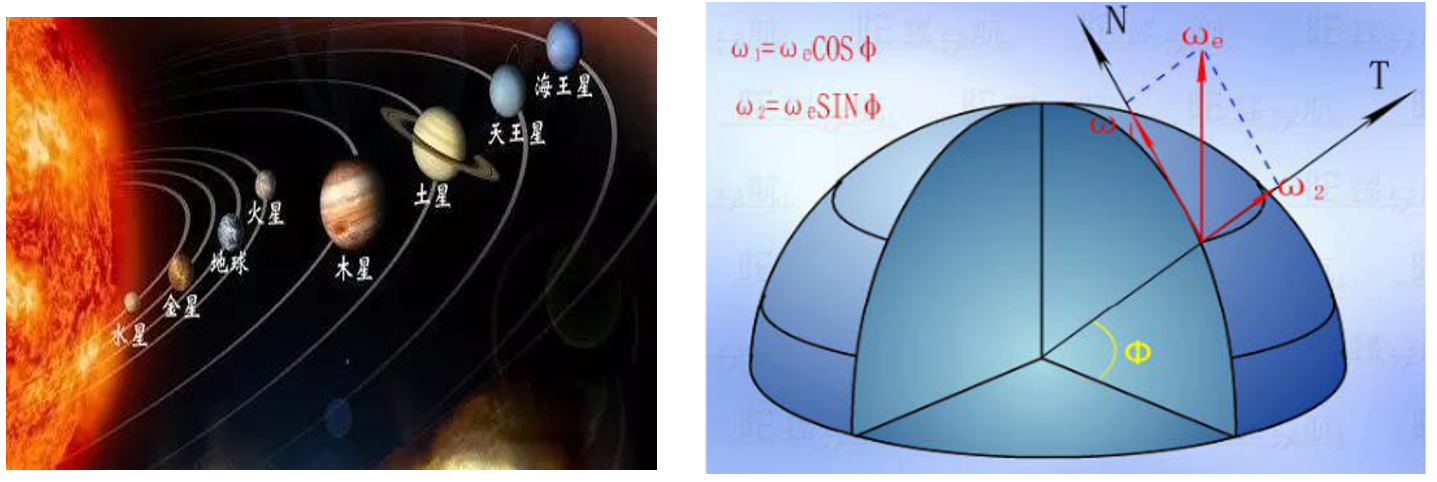
我们主要研究在地球表面(包括大气层内)运动载体的导航定位问题,地球每时每刻都在围绕着自转轴和太阳在自转和公转,而运动载体又在地球表面进行着复杂而多样的运动,惯性导航的工作原理就是利用陀螺和加速度计对运动载体及地球自转的角速度和加速度进行测量,再通过数据采集系统和专门的导航软件和计算机计算获得运动载体的方位、姿态等信息。
![]()
![]()
![]()
ωx = - Vy/R
ωy = Vx/R+Ωcosφ
ωz = (Vx/R)tgφ+Ωsinφ
式中:Vx、Vy分别为载体相对地球的东向及北向速度, Ω为地球自转角速度, φ为当地纬度。
陀螺是一种用于检测载体相对惯性(太阳)坐标系运动角速度的精密器件,机械陀螺(转子高速旋转状态下)具有定轴性和进动性。这两大特性奠定了陀螺导航的基础。如果在陀螺结构中加入测速电子和旋转变压器的测速和测角器件,由于陀螺转子具有定轴性,就可以利用上述器件测量出陀螺主轴(转子)与陀螺壳体(与船体固联)的转到角速度和角度,进而也可以作为角度和角速度传感器。

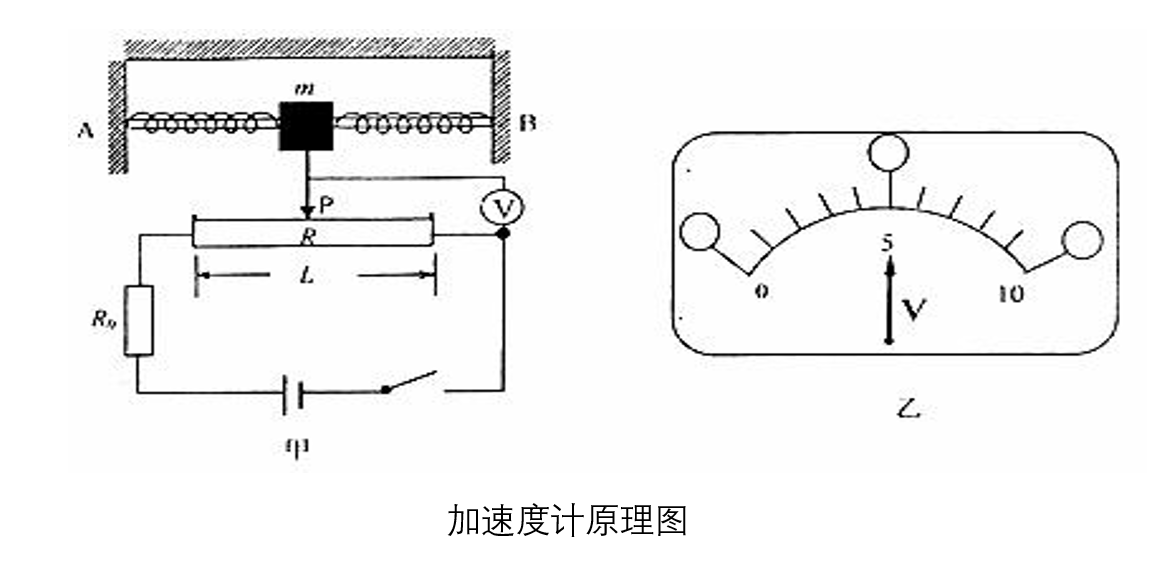
在地理坐标系中,作用在加速度计上的绝对加速度为:
A = [dV / dt]t+(ω +Ω) X V–g (1-1)
上式中 (ω +Ω) X V 为哥氏加速度及离心加速度之和,ω 为地理坐标系相对惯性坐标系的角速度。
由于船舶在垂直方向上的速度很小,同时考虑哥氏加速度和离心加速度比起重力加速度g来要小很多,把(1-1)简化并在地理坐标系下分解:
Ax = [dVx / dt ] -2Vy•Ωsinɸ - Vx•Vy/R•tgɸ
Ay = [dVy / dt ] +2Vx•Ωsinɸ +Vx•Vx/R•tgɸ
Az = g 哥氏加速度 离心加速度
在惯导系统中,我们需要测量的是船舶的运动加速度项dVx / dt 、dVy / dt ,而其余各项(哥氏加速度和离心加速度)是我们所不需要的,因此称之为“有害加速度”,以后还需在加速度计的输出信号中将它们补偿掉。对于船舶来说,这些有害加速度的量值一般在10-4g左右,相当平台倾斜20 ֞ 所产生的误差,一般需要补偿掉。
有了陀螺和加速度计这两个武器,我们就有手段测量地球和我们在地球表面上运动的角速度和加速度了,在导航理论和算法的分析和指导下,再利用机械、电子和计算机技术就可以获得运动物体的航向、姿态、速度和位置等信息的测量了。

 浏览器自带分享功能也很好用哦~
浏览器自带分享功能也很好用哦~RELATED PROGRAMS
 沪公网安备 31011502007089号
沪公网安备 31011502007089号